这篇文章主要介绍了Python计算不规则图形面积算法实现解析,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友可以参考下
介绍:大三上做一个医学影像识别的项目,医生在原图上用红笔标记病灶点,通过记录红色的坐标位置可以得到病灶点的外接矩形,但是后续会涉及到红圈内的面积在外接矩形下的占比问题,有些外接矩形内有多个红色标记,在使用网上的opencv的fillPoly填充效果非常不理想,还有类似python计算任意多边形方法也不理想的情况下,自己探索出的一种效果还不错的计算多圈及不规则图形的面积的算法。
能较为准确的计算出不规则图形的面积
正文:算法的思想很简单,遍历图片每一列,通过色差判断是否遇到标记圈,将坐标全部记录,对每一列的坐标都进行最小行和最大行记录,确定每一列的最小和最大的坐标,然后上色(类似opencv的fillPoly的实现,但是细节有些区别),只是这样效果并不好,将图片旋转90度,再做一边,将两个图片的结果放在一起做与操作,得到结果就能很好的处理多圈的标记问题和多算面积的问题(比如上面的08-LM),

算法实现
全程只用pillow库
首先先用屏幕拾色器获取目标颜色的rgb值,我这种情况下就是(237,28,36),前期截取外接矩形也是要这一步的,颜色也一致
def pixel_wanted(pix): return pix==(237,28, 36)
每一列都设定翻转位初始为False,如果上一个像素点不是目标色,当前是目标色则开始记录,一旦不是目标色,停止检测
top_Pixel都设定为黑色(0,0,0)因为有图片最上方就是目标色,导致判定出问题,直接让最上面的像素初始化是黑色
coordinate_List记录了所有符合的点坐标
coordinate_List = []
top_Pixel = (0,0,0)
for x in range(im.size[0]):
flag = False #初始化每一列翻转位为False
for y in range(im.size[1]):
current_pixel = im.getpixel((x,y))
last_pixel = im.getpixel((x,y-1)) if y>0 else top_Pixel
#翻转判定
if pixel_wanted(current_pixel) and not pixel_wanted(last_pixel):
flag = True
if flag and not pixel_wanted(current_pixel):
flag = False
if(flag):
coordinate_List.append((x,y))
coordinate_List中的点如下图

然后就是将上面获得coordinate列表进行处理
将coordinate列表中每一列的最小坐标和最大坐标进行记录
因为每一列记录的数量并不确定(应该可以在上一步改进一下),所以需要遍历多次
首先找到第一个列出现的坐标,将它的行信息记录(行信息最小确定),
然后遍历出全部的同列的坐标,比较行坐标,如果大的就将最大的代替(行信息最大确定),用一个新的列表记录数据
coordinate_Min_Max_List = []
#找最小最大
for i in range(im.size[0]):
min=-1
max=-1
for coordinate in coordinate_List:
if coordinate[0] == i:
min = coordinate[1]
max = coordinate[1]
break
for coordinate in coordinate_List:
if coordinate[0] == i:
if coordinate[1]>max:
max = coordinate[1]
coordinate_Min_Max_List.append(min)
coordinate_Min_Max_List.append(max)
其中要将min和max都初始化为一个坐标不存在的值比如-1,为了在下一步多圈且有空隙情况下,不会出现残影现象,如下图

上一步的最后得到一个列表,第n列的最小行和最大行分别是第2n和2n+1元素,结果中的-1,为了让下一步不会画进去

然后就是绘制图片了,每一列将列表中对应的最小行到最大行涂满
#上色
for x in range(im.size[0]):
for y in range(im.size[1]):
min = coordinate_Min_Max_List[x*2]
max = coordinate_Min_Max_List[x*2+1]
if min<y<max:
im.putpixel((x,y),(0,255,0))
else:
#可以把非红圈的上掩膜遮住
pass
至此,就是类似opencv的算法实现,虽然还差翻转做与操作,但是已经比opencv生成的效果好,写成函数后续调用,
然后就是简单的翻转90度,再调用一次这个函数再做一遍
def Cal_S(im):
im_0 = im.rotate(0)
im_90 = im.rotate(90, expand=True)
im_0 = fillPoly(im_0)
im_90 = fillPoly(im_90)
im_90 = im_90.rotate(-90, expand=True)
i=0
for x in range(im.size[0]):
for y in range(im.size[1]):
if(im_0.getpixel((x,y))==(0,255,0) and
im_90.getpixel((x,y))==(0,255,0)):
im.putpixel((x,y),(0,255,0))
i+=1
return i/(im.size[0]*im.size[1])
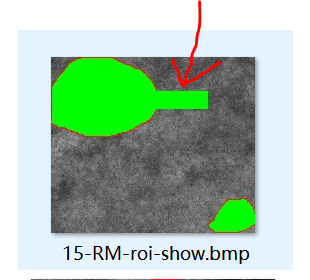
做两遍的效果图


可以看到效果非常不错,但是依旧有个别图像有问题,比如十字分布的,
但现在的话误差已经降低非常多了,这些极其个别的十字现象可以手动把原图切割一下,或者干脆不处理了

所有代码,画出绿图片为了方便直观的查看,函数中可以把图片顺便保存一下,总体看一下效果
from PIL import Image
def pixel_wanted(pix):
return pix==(237,28, 36)
def fillPoly(im):
coordinate_List = []
top_Pixel = (0,0,0)
for x in range(im.size[0]):
flag = False #初始化每一列翻转位为False
for y in range(im.size[1]):
current_pixel = im.getpixel((x,y))
last_pixel = im.getpixel((x,y-1)) if y>0 else top_Pixel
#翻转判定
if pixel_wanted(current_pixel) and not pixel_wanted(last_pixel):
flag = True
if flag and not pixel_wanted(current_pixel):
flag = False
if(flag):
coordinate_List.append((x,y))
coordinate_Min_Max_List = []
#找最小最大
for i in range(im.size[0]):
min=-1
max=-1
for coordinate in coordinate_List:
if coordinate[0] == i:
min = coordinate[1]
max = coordinate[1]
break
for coordinate in coordinate_List:
if coordinate[0] == i:
if coordinate[1]>max:
max = coordinate[1]
coordinate_Min_Max_List.append(min)
coordinate_Min_Max_List.append(max)
#上色
for x in range(im.size[0]):
for y in range(im.size[1]):
min = coordinate_Min_Max_List[x*2]
max = coordinate_Min_Max_List[x*2+1]
if min<y<max:
im.putpixel((x,y),(0,255,0))
else:
#可以把非红圈的上掩膜遮住
pass
return im
def Cal_S(im):
im_0 = im.rotate(0)
im_90 = im.rotate(90, expand=True)
im_0 = fillPoly(im_0)
im_90 = fillPoly(im_90)
im_90 = im_90.rotate(-90, expand=True)
i=0
for x in range(im.size[0]):
for y in range(im.size[1]):
if(im_0.getpixel((x,y))==(0,255,0) and
im_90.getpixel((x,y))==(0,255,0)):
im.putpixel((x,y),(0,255,0))
i+=1
return i/(im.size[0]*im.size[1])
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持。
免责声明:本站资源来自互联网收集,仅供用于学习和交流,请遵循相关法律法规,本站一切资源不代表本站立场,如有侵权、后门、不妥请联系本站删除!
《魔兽世界》大逃杀!60人新游玩模式《强袭风暴》3月21日上线
暴雪近日发布了《魔兽世界》10.2.6 更新内容,新游玩模式《强袭风暴》即将于3月21 日在亚服上线,届时玩家将前往阿拉希高地展开一场 60 人大逃杀对战。
艾泽拉斯的冒险者已经征服了艾泽拉斯的大地及遥远的彼岸。他们在对抗世界上最致命的敌人时展现出过人的手腕,并且成功阻止终结宇宙等级的威胁。当他们在为即将于《魔兽世界》资料片《地心之战》中来袭的萨拉塔斯势力做战斗准备时,他们还需要在熟悉的阿拉希高地面对一个全新的敌人──那就是彼此。在《巨龙崛起》10.2.6 更新的《强袭风暴》中,玩家将会进入一个全新的海盗主题大逃杀式限时活动,其中包含极高的风险和史诗级的奖励。
《强袭风暴》不是普通的战场,作为一个独立于主游戏之外的活动,玩家可以用大逃杀的风格来体验《魔兽世界》,不分职业、不分装备(除了你在赛局中捡到的),光是技巧和战略的强弱之分就能决定出谁才是能坚持到最后的赢家。本次活动将会开放单人和双人模式,玩家在加入海盗主题的预赛大厅区域前,可以从强袭风暴角色画面新增好友。游玩游戏将可以累计名望轨迹,《巨龙崛起》和《魔兽世界:巫妖王之怒 经典版》的玩家都可以获得奖励。
更新日志
- 小骆驼-《草原狼2(蓝光CD)》[原抓WAV+CUE]
- 群星《欢迎来到我身边 电影原声专辑》[320K/MP3][105.02MB]
- 群星《欢迎来到我身边 电影原声专辑》[FLAC/分轨][480.9MB]
- 雷婷《梦里蓝天HQⅡ》 2023头版限量编号低速原抓[WAV+CUE][463M]
- 群星《2024好听新歌42》AI调整音效【WAV分轨】
- 王思雨-《思念陪着鸿雁飞》WAV
- 王思雨《喜马拉雅HQ》头版限量编号[WAV+CUE]
- 李健《无时无刻》[WAV+CUE][590M]
- 陈奕迅《酝酿》[WAV分轨][502M]
- 卓依婷《化蝶》2CD[WAV+CUE][1.1G]
- 群星《吉他王(黑胶CD)》[WAV+CUE]
- 齐秦《穿乐(穿越)》[WAV+CUE]
- 发烧珍品《数位CD音响测试-动向效果(九)》【WAV+CUE】
- 邝美云《邝美云精装歌集》[DSF][1.6G]
- 吕方《爱一回伤一回》[WAV+CUE][454M]